当无人机飞行提示不正常,或者配置修改,或者有撞击等异常事件后建议重新校准各个传感器。并且验证各个模块运行正常。
- 利用PC机器直接登录到视觉模块(ssh khadas@192.168.2.20),然后监听视觉定位消息(rostopic echo /mavros/vision_pose/pose)。也可以在有 ROS功能的PC机器上通过ROS remote连接,直接监听定位消息,或者在rviz界面观察/mavros/vision_pose/pose。
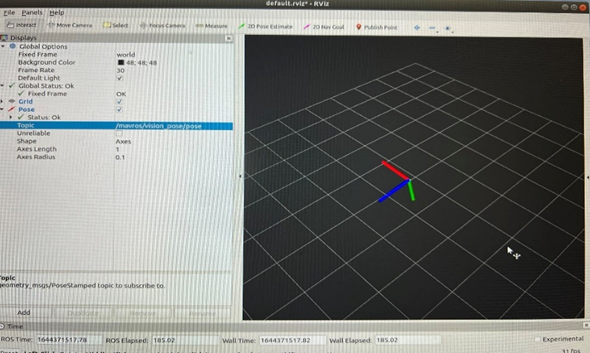
- 验证方法:手持无人机进行前后左右等运动,定位消息始终反应了正确的运动趋势,并且当无人机放回原点时候,定位消息也基本回到原点坐标。如图7.8。