远程连接机载电脑
用户需要准备一台PC机,可以登录到机载电脑。因为平台软件支持ROS接口,用户最好预装好Ubuntu系统和ROS软件,这样就可以调试平台上的软件了。远程登录方法:
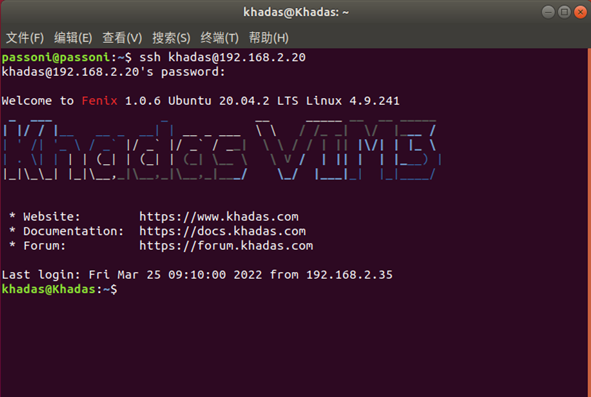
启动机载电脑后(大概20秒),在PC机上选择无线网络khadas_ap(密码:12345678)。如图4.1所示。打开终端使用ssh登录到机载电脑上,如图4.2所示:
>ssh khadas@192.168.2.20
>passwd: khadas
远程文件传输 #
在PC命令行终端上,可以使用scp进行文件传输。例如:
- 拷贝PC文件到机载电脑的/home/khadas目录下:
>scp file khadas@192.168.2.20:~/- 拷贝机载电脑的/home/khadas/file到PC终端的当前目录下:
>scp file khadas@192.168.2.20:~/- 拷贝PC目录到机载电脑的/home/khadas目录下:
>scp -r dir khadas@192.168.2.20:~/远程ROS调试
机载电脑上的软件支持ROS接口,可以设置为MASTER。PC机上指定ROS MASTER后,就可以通过ROS接口进行远程联调了,如图4.3所示。
- 在机载电脑上设置master IP:
>export ROS_IP=192.168.2.20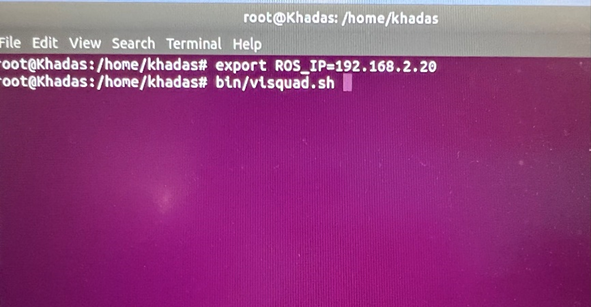
- 在PC上指定master IP
>export ROS_MASTER_URI=http://192.168.2.20:11311可以运行一下ROS命令测试一下ROS连接是否成功,例如:
- 运行rosnode list查看ROS节点,如图4.4所示。
>rosnode list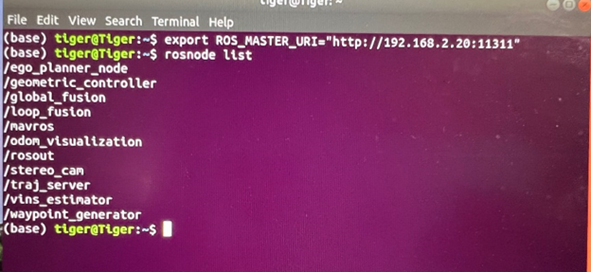
上述ROS连接成功后,可以运行其他调试用的ROS任务。例如:
- 运行rviz图形界面显示ROS消息结果,如图4.5所示。
>rosrun rviz rviz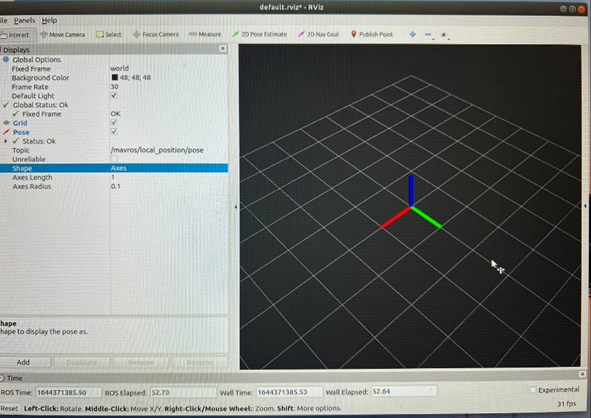
机载电脑自启动设置
机载电脑支持systemd自启动系统,用户可以添加自己的自启动脚本。具体方法可以参见Ubuntu systemd service的管理方法。
目前OWL无人机已经添加的自启动服务有Wifiap,和Visquad:
- Wifiap服务:启动无线AP网络
具体的AP的参数在/home/khadas/bin/wifi.sh。用户可以修改AP的IP,密码等。
- Visquad服务:启动OWL视觉算法
对应的视觉算法启动脚本在/home/khadas/bin/visquad.sh。用户可以修改/添加自启动的程序。



