1. 使用前的准备
1.1 产品介绍
猫头鹰AI视觉无人机(以下简称OWL)是专为科研工作者与航空器开发者打造的小型化无人机开发平台,其搭载VisBot视觉模块,适用于无GPS环境下基于视觉的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。视觉定位是通过融合双目视觉(Stereo Camera)传感器的双目图像,和惯性导航模块(IMU)的6轴数据,实现的VIO算法(Vins-Fusion)。避障功能是基于视觉定位结果(VIO Pose),和双目产生的深度图(Depth),实时生成地图和路径规划的避障算法(EGO-Planner)。

OWL具体实现的软硬件说明如下:
- 双目视觉:自主研发生产的双目模组(OV7251), 提供10-60fps的640×480分辨率的双目图像;
- 深度图:自主的双目匹配算法生成的深度图。目前在Khadas VIM3平台上提供10-15fps,640×480分辨率的深度图;
- IMU:OWL飞控模块自带的IMU传感器,提供200Hz的6轴IMU数据。
- VIO算法:基于VINS-Fusion开源算法,优化同步开源;
https://github.com/HKUST-Aerial-Robotics/VINS-Fusion
- EGO-Planner算法:基于EGO-Planner的开源算法,优化后同步开源;
https://github.com/ZJU-FAST-Lab/ego-planner
- Khadas VIM3机载平台:Khadas VIM3机载平台提供6核CPU和5TOPS的NPU。具体参见https://www.khadas.cn/vim3
产品主要规格参数如表1.1所示。
| 长度 | 300 mm(不含桨叶保护罩) |
| 宽度 | 300 mm(不含桨叶保护罩) |
| 对角轴距 | 380 mm |
| 最大飞行速度 | |
| 水平 | 15 m/s |
| 上升 | 5 m/s |
| 下降 | 4 m/s |
| 最大续航时间 | 12 min |
| 起飞重量 | 1520 g(含桨叶保护罩) |
| 抗风等级 | 4 级 |
1.2 物品清单
产品以整机的形式交付。用户在收到货物后,请检查包装内的设备及配件是否与清单相符。无人机整机开发平台如图1.1所示,物品清单如表1.2所示。

| 物品名称 | 型号及规格 | 数量 | 备注 |
| 无人机飞行平台 | OWL | 1 | |
| AI机器视觉平台 | VisBot | 1 | 机载安装 |
| 遥控器 | I6X | 1 | 8通道 |
| 动力电池 | 5300mAh/4S/45C | 1 | 使用时电压不得低于14.8V |
| 螺旋桨 | 9450 | 4 | 2正2反 |
| 平衡充电器 | ZT-B3 | 1 | |
| 充电器适配器 | 12V | 1 | |
| 工具/配件包 | / | 1 | |
| 数据线 | MICRO_USB | 1 | 飞控调参使用 |
| 电池电压检测模块 | / | 1 | 用于测量电池电压 |
| 机体保护罩 | / | 4 | 默认不安装 |
| 用户手册 | / | 1 | 电子版或纸质版 |
| 免责声明 | / | 1 | |
| 飞行安全指引 | / | 1 | |
| 合格证 | / | 1 | |
| 航空铝包装箱 | / | 1 |
如果您选配了可选配件,也需要检查可选配件是否齐全。主要可选配件如表1.3所示。
| 物品名称 | 型号及规格 | 数量 | 备注 |
| 备用电池 | 5300mAh/4S | 1 | |
| GPS模块 | GPS_M8N | 1 | |
| GPS支架 | / | 1 | |
| 数传模块 | 915 MHz | 1 | |
| 其他传感器模块 | / | 1 |
1.3 飞行安全指引
飞行安全指引旨在帮助飞手树立安全意识,您可通过查看基本飞行安全提示,在合法范围内享受安全的飞行乐趣。无人机飞行存在一定的风险,建议飞行前认真了解无人机参数、性能和可能会出现的各种情况,做好相应的应对措施,试飞时请务必在远离人群、危险物品和易碎物品的空旷区域进行。
- 务必按照用户手册进行操作
| 请务必按照用户手册进行操作,以免造成不必要的危险和损失。 |
- 请遵守当地法律
| 请留意当地关于无人机飞行和使用的相关法律法规并严格遵守。严禁在任何禁飞区和危险区域内飞行或超过限制高度飞行。 |
- 电气安全性
| 为了避免可能的电击造成的损坏,在安装、拆卸或者更换任何部件时请务必断开电源,务必确保所有电源线、数据线连接妥当后才可以通电测试。 |
- 消除静电影响
| 拿取元件时注意消除身上的静电,尽量不要直接用手接触芯片;为避免可能的干扰,请保持数据线、电源线整齐且容易辨识。 |
- 安装牢靠保存妥当
| 使用产品前请仔细检查各部件是否安装到位,暂时用不到的部件是否取下并妥善保存,以免零件在移动无人机或飞行时脱落。 |
- 调试及校准过程中不要安装螺旋桨
| 调试以及校准过程中一定不要安装螺旋桨,以免造成不必要的人身伤害或财产损失。 |
- 飞行前请检查无人机状况
| 飞行之前请仔细检查螺旋桨是否损坏、老化,电池及其他部件是否安装牢固,如有损坏应及时更换或维修。确保您的无人机、遥控器及其他设备电量充足。 |
- 保证合适的温度
| 设备充电及工作时请保证环境温度在允许范围内。 |
- 不要在恶劣天气中飞行
| 避免在高温、高湿、强磁场、强辐射、强灰尘等极端情况下使用,同时避免在雨雪、冰雹、大雾、大风等恶劣气象条件下使用。 |
- 请选择开阔空旷的飞行场地
| 飞行时请远离人群、建筑物并确保周围没有其他任何无人机试飞或正常飞行。 |
- 设立警示标志
| 如有必要请在试飞区域周围设置警示标志,以免在试飞过程中有其他人进入进而发生危险。 |
- 饮酒后请勿操控无人机
| 起飞前和操作无人机时请勿饮用含有酒精成分的饮料及口服药剂或食用其他影响精神状态的食品或药品。 |
- 在合理范围内飞行
| 请勿超过安全飞行高度且在视距范围内飞行,飞行过程中确保无人机在您的视线范围之内,尽量不要在没有地面站或不能实时定位的情况下在障碍物背面或者无法直视的位置飞行。 |
- 获取定位信号后再起飞
| 请在取得卫星定位信号后再起飞,并尽可能利用安全飞行功能如自动返航、定点悬停等。 |
- 时刻保持对无人机的控制
| 飞行过程中即便在使用自动功能时,如自动起飞、自动降落等,双手也不要离开遥控器,始终保持对无人机控制。 |
- 不要用手触碰旋转的螺旋桨
| 无人机着陆后,在螺旋桨停止转动之前,切勿用手触碰,以免受伤。着陆时请慢慢降低油门,以免无人机失控坠落。 |
- 及时上锁
| 无人机着陆后,务必将无人机上锁,以免误操作发生事故。 |
- 环境保护
| 电路板、电池和塑料部件可能含有汞、镉、铅等物质,请勿随生活垃圾丢弃。 |
获取更多内容请登陆中国民用航空局网站http://www.caac.gov.cn/。
1.4 免责声明
请用户在使用本产品前,务必仔细阅读本声明相关条款,一旦使用本产品,即视为对本声明的所有内容表示认可和接受。
本产品适合18周岁以上人士使用,未满18周岁的未成年人需要在监护人或18周岁以上成年人陪同下使用。
使用本产品时,若发生以下原因直接或间接造成无人机坠落、撞击或者以其他方式造成用户本人或他人的人身伤害和财产损失,我公司将不承担赔偿责任。
A.用户没有按照本手册的要求组装和使用造成人身伤害和财产损失;
B.用户主动或故意操控无人机造成人身伤害和财产损失;
C.用户操作或主观判断失误造成人身伤害和财产损失;
D.用户在无人机自然磨损、老化的情况下仍然操控无人机飞行造成人身伤害和财产损失;
E.用户在无人机和其他设备电量不足时下仍操控无人机飞行造成人身伤害或财产损失;
F.用户在明知无人机处于非正常工作状态下仍操控无人机飞行造成人身伤害和财产损失;
G.用户在恶劣气象条件或极端情况下仍然操控无人机飞行造成人身伤害和财产损失;
H.用户在磁场干扰区域、无线电干扰区域飞行造成人身伤害和财产损失;
I.用户在能见度不良、视线受到遮挡的情况下操控无人机飞行造成人身伤害和财产损失;
J.用户操控无人机飞行闯入任何禁飞区造成人身伤害和财产损失;
K.用户对产品进行非法改装后造成人身伤害和财产损失;
L.无人机被武器击中、或被其他无人机撞击造成损坏进而造成人身伤害和财产损失;
M. 其他不属于威斯博&中航恒拓责任范围内的情况。
使用本产品时,若发生以下原因直接或间接造成泄密或侵权,我公司将不承担赔偿责任。
A.用户故意造成损坏;
B.用户不具备飞行经验或技术水平不足导致损坏;
C.用户自行更换或无本公司标识的产品和配件;
D.使用未从本公司或指定经销商处购买的配件;
E.外壳,接插部件的自然消耗,磨损及老化;
F.使用非原装配件以及电源、线材等;
G.安装、操作错误,或在非产品所规定下的工作环境下使用;
H.在雨雪、冰雹、大雾、大风等恶劣气象条件下使用;
I.在高温、高湿、强磁场、强辐射、强灰尘等极端情况下使用;
J.滥用、误用,包括超出工作负荷使用;
K.无人机被武器击中或被其他无人机撞击造成损坏;
L.保管不当(液体渗入、动物撕咬等)造成的损坏;
M.使用自行开发的软件导致产品损坏;
N.擅自拆机修理或越权改装及非授权维修人员维修;
O.用户没有按照用户手册的要求组装和使用、超出限度的改装;
P.用户操作失误、主观判断失误造成产品损坏;
Q.天灾(包括但不限于水灾、火灾、地震、雷击、台风等);
R.遇到其他不可抗力造成损坏;
S.产品被盗;
T.其他不属于威斯博&中航恒拓责任范围内的情况。
2 多旋翼无人机基础知识
2.1 姿态控制的原理
四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。具有多变量、非线性、强耦合和干扰敏感的特性。
姿态控制是整个飞行控制的关键,因为四旋翼飞行器的姿态与位置存在直接耦合的关系。如果能精确的控制飞行姿态,则采用PID控制率就足以实现其位置与速度的控制。
四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在图2.1中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
a)垂直运动:在图2.1(a)中,同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
b)俯仰运动:在图2.1(b)中,电机1的转速上升,电机3的转速下降(改变量大小应相等),电机2、电机4的转速保持不变。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转,同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
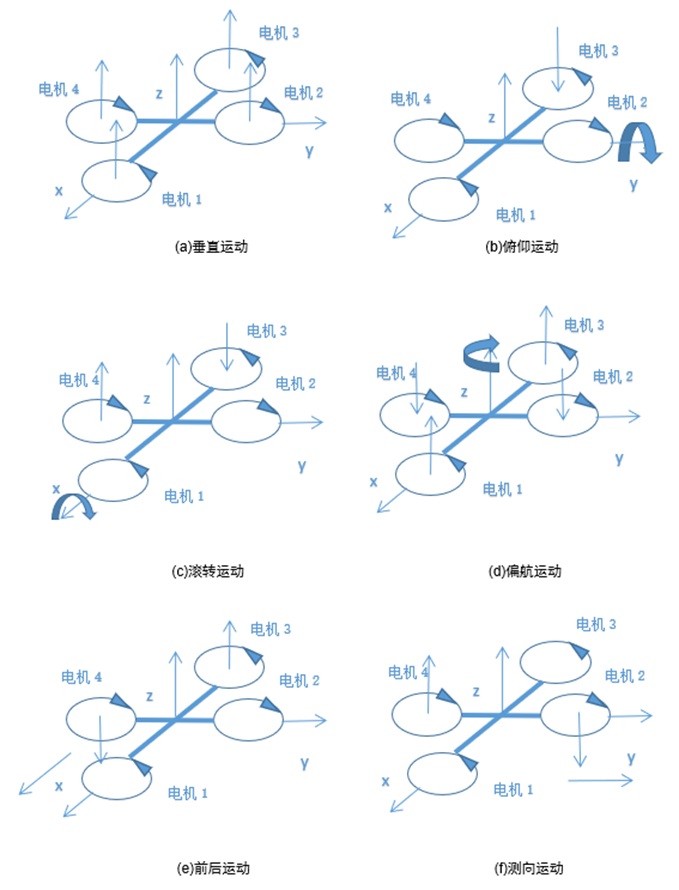
c)滚转运动:与图2.1(b)的原理相同,在图2.1(c)中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正向和反向),实现飞行器的滚转运动。
d)偏航运动:旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图2.1(d)中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
e)前后运动:要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在图2.1(e)中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图2.1(b)的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反(在图2.1(b)和图2.1(c)中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动)。
f)倾向运动:在图2-4(f)中,由于结构对称,所以倾向飞行的工作原理与前后运动完全一样。
另外对于六旋翼、八旋翼飞行器,原理与四旋翼基本相同,此处不再赘述。
2.2 多旋翼飞行器主要部件
多旋翼飞行器主要由飞行控制器、电动机、电子调速器、螺旋桨、电池、机架、遥控器、接收机和通讯设备等组成。
2.2.1 电动机
电动机简称电机,常见的电动机包括有刷电机和无刷电机。有刷电机启动快,制动及时,低速性能优异,扭矩大。同时还可以在大范围内平滑地进行调速且控制电路相对简单等特点,但是有刷电机磨损大,发热大,效率低。无刷电机没有电刷,磨损和震动都相对较小,同时对外界产生的电磁干扰也相对较小,无刷电机容易达到较高的转速。另外,还有一种电机为空心杯电机。空心杯电动机在结构上突破了传统电机的转子结构形式,采用的是无铁芯转子,也叫空心杯型转子。空心杯电机也分为有刷和无刷两种,有刷空心杯电机转子无铁芯,无刷空心杯电机定子无铁芯。空心杯电机能量转换效率高,响应快,运行稳定,能量密度高。
常见用于多旋翼飞行器的电机通常为空心杯电机和三相无刷电机。空心杯电机常用于微型和小型多旋翼飞行器,而三相无刷电机常用于较大的多旋翼飞行器。在这里我们采用的是三相无刷电机。
无刷电机型号代表其尺寸及性能,如2212-920KV,22代表电机的线圈外经为22mm,12代表转子的高度为12mm,920KV代表电压每增加1V电机的实际转速增加920r/min。
三相直流无刷电机,输入到驱动器是交流电,但施加在电动机上的电压是直流电压,作用在电枢(定子)线圈上的电压极性和通过电枢(定子)线圈上的电流方向都是交变的,电枢线圈内的感应电动势的波形基本上是相似的,方向都是交变的,直流无刷电机有三组120度布置的绕组,需要把直流电通过控制可控硅或者模块交替给三个绕组供电才能产生一个旋转的磁场从而带动转子转动。
由于多旋翼飞行器各个旋翼旋转方向不同,因此电机的旋转方向也不相同,为了保证螺旋桨旋转时不会脱落,务必按照电机标称方向使用。
2.2.2 电子调速器
电子调速器简称电调,英文Electronic Speed Controller,简称ESC。针对电机不同,可分为有刷电子调速器和无刷电子调速器,电子调速器的主要作用就是将飞行控制器的控制信号转变为相应大小的电流,从而来控制电机的转速,多旋翼飞行器通常使用无刷电调。
2.2.3 螺旋桨
螺旋桨分为正桨和反桨,顺时针旋转风力向后的螺旋桨为正桨,逆时针旋转风力向后的螺旋桨为反桨。螺旋桨的选择要与电机匹配,通常大螺旋桨需要用低KV的电机,小螺旋桨用高KV的电机。螺旋桨的型号通常是4位数字,如1045、9443,前面两位代表螺旋桨的直径(单位为英寸,1英寸≈25.4mm),当直径大于10英寸时,即直接表示直径,当直径小于10英寸时,表示的数值是实际尺寸的10倍。后两位是螺旋桨的螺距。
2.2.4 动力电池
电池用来给飞行器供电。对于一般的多旋翼飞行器来说,一般选择锂电池,锂电池能量密度较高且成本较低。
2.2.5 机架结构
机架是整个飞行器的骨架,主要用来固定飞行控制器、电机、接收机、电池等部件。由于多旋翼飞行器对气动外形要求不高,因此机架形状多种多样,为不同功能设计的不同形式的机架可以根据需求进行选择。
2.2.6 遥控器和接收机
遥控器主要用于手动飞行时向飞行器发送各种控制命令,常用的遥控器一般使用的频段为2.4GHz。正常的四旋翼至少需要四通道的遥控器。通道越多说明遥控器所能控制的功能越多。所谓的通道,指可以用遥控器控制的动作路数,比如上下、左右、前后、旋转。通常操作多旋翼飞行器至少需要上下、左右、前后、旋转四个通道,因此至少需要使用支持四通道的遥控器。接收机是用来接收遥控器的信号并将信号通过自身端口传输给飞行控制器或者电子调速装置。
2.2.7 定位及通信设备
定位设备包括卫星定位以及激光、超声波、机器视觉模块等,通信设备包括近距离通信使用的数传电台、Wi-Fi、蓝牙、ZigBee等,也包括远距离传输的GPRS、CDMA、LTE设备。如果需要实时将飞行器上所带相机的图像回传,还需要安装图传设备。
3 OWL无人机组装
3.1 电机序号及旋转方向
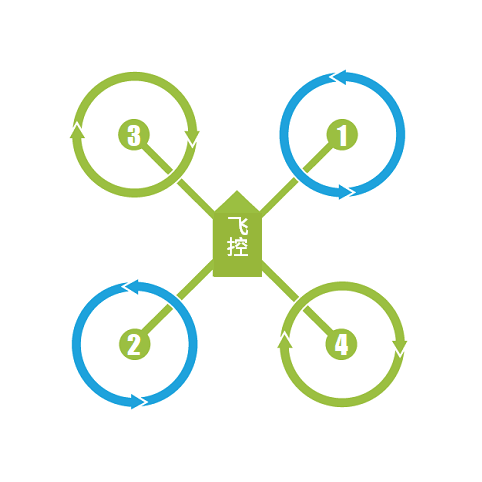
图3.1为OWL无人机的电机序号图,分别为M1、M2、M3、M4及其对应的旋转方向,供用户参考。
3.2 安装桨叶保护罩
用户根据实际情况自行选择是否安装桨叶保护罩,如需安装,请准备好4个保护罩,使用机身上原有的4颗M3螺丝,将保护罩安装固定在4个机臂的末端,用螺丝拧紧,如图3.2所示。

3.3 安装螺旋桨
飞行前需要手动将螺旋桨安装到位,请按如下顺序安装螺旋桨。
- M1、M2电机头部为平面,逆时针旋转,安装银色螺旋桨;
- M3、M4电机头部为凹面,顺时针旋转,安装黑色螺旋桨。
示意图如图3.3所示,实际安装效果如图3.4所示。
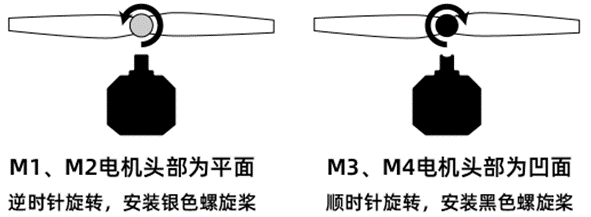

图3.4 螺旋桨安装方向实际效果
3.4 安装电池
使用电池固定扎带将电池固定,请务必将电池固定牢固,以免电池在飞行中脱落,如图3.5所示。
另外,电池插头要插接牢固,避免飞行中因震动等原因导致接头松脱,致使无人机断电坠毁。
注意:OWL的动力电池规格型号为4S/5300mAh/45C,在使用时电池电压不得低于3.65V*4S=14.6V,否则会导致电池损坏。

至此,已经完成了对OWL的组装。
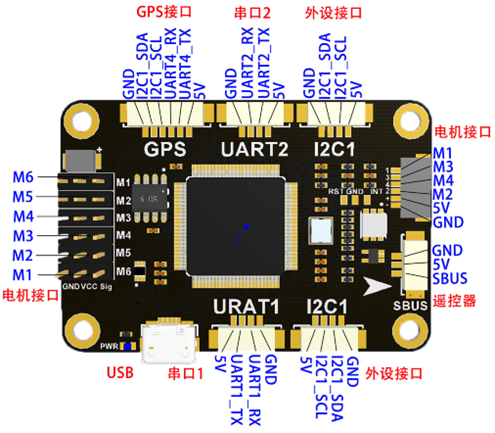
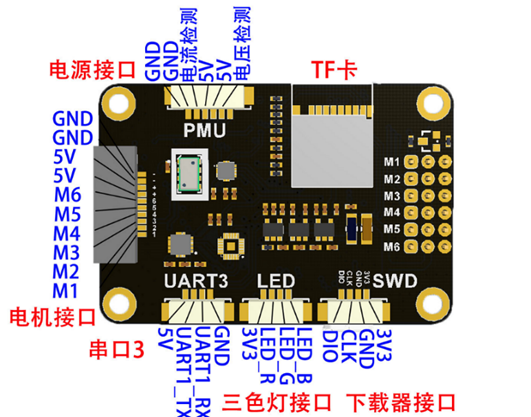
3.5 飞控系统内部构造及接口示意图
OWL采用Enzo Pro 第四代飞行控制系统,支持PX4所有功能,可直接通过QGroundControl下载和更新固件,正面特征如图3.6所示,背面特征如图3.7所示。
4 飞行前的准备
OWL提供即开即用产品功能。用户只需要插上电池,等待各项应用启动后,无人机就可以起飞飞行。当用户通过遥控器切换到位置控制模式(POSCTL)的时候,视觉导航模块提供的定位功能就会被飞控融合,此时无人机会自主控制位置与姿态。当用户切换到OFFBOARD模式,就可以启用机载电脑的程序来控制无人机自动飞行。用户需要注意的是无人机电源开启后需要等待视觉定位模块和应用启动,大概30秒(机载平台的风扇转起来)。
4.1 OWL机载平台设置
4.1.1 远程连接机载电脑
用户需要准备一台PC机,可以登录到机载电脑。因为平台软件支持ROS接口,用户最好预装好Ubuntu系统和ROS软件,这样就可以调试平台上的软件了。远程登录方法:
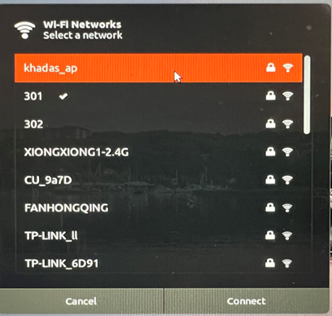
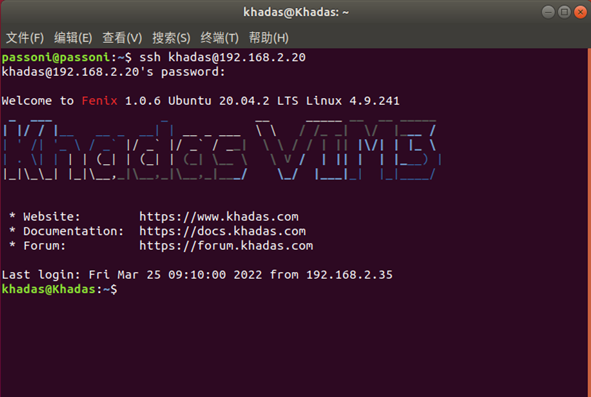
启动机载电脑后(大概20秒),在PC机上选择无线网络khadas_ap(密码:12345678)。如图4.1所示。打开终端使用ssh登录到机载电脑上,如图4.2所示:
>ssh khadas@192.168.2.20
>passwd: khadas
4.1.2 远程文件传输
在PC命令行终端上,可以使用scp进行文件传输。例如:
- 拷贝PC文件到机载电脑的/home/khadas目录下:
>scp file khadas@192.168.2.20:~/- 拷贝机载电脑的/home/khadas/file到PC终端的当前目录下:
>scp file khadas@192.168.2.20:~/- 拷贝PC目录到机载电脑的/home/khadas目录下:
>scp -r dir khadas@192.168.2.20:~/1.1.2 远程ROS调试
机载电脑上的软件支持ROS接口,可以设置为MASTER。PC机上指定ROS MASTER后,就可以通过ROS接口进行远程联调了,如图4.3所示。
- 在机载电脑上设置master IP:
>export ROS_IP=192.168.2.20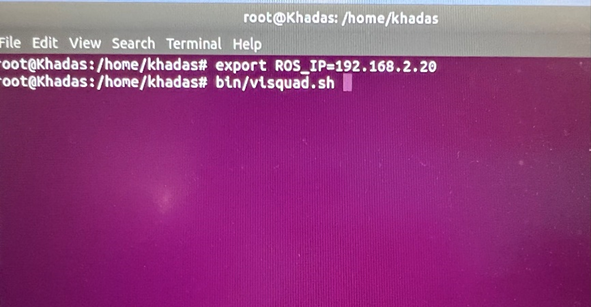
- 在PC上指定master IP
>export ROS_MASTER_URI=http://192.168.2.20:11311可以运行一下ROS命令测试一下ROS连接是否成功,例如:
- 运行rosnode list查看ROS节点,如图4.4所示。
>rosnode list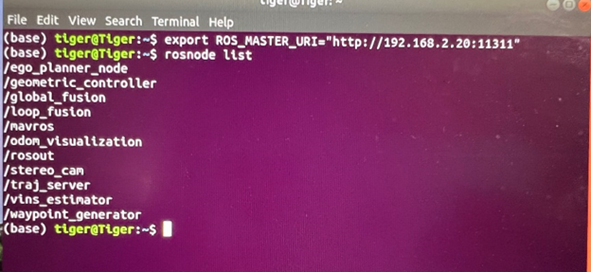
上述ROS连接成功后,可以运行其他调试用的ROS任务。例如:
- 运行rviz图形界面显示ROS消息结果,如图4.5所示。
>rosrun rviz rviz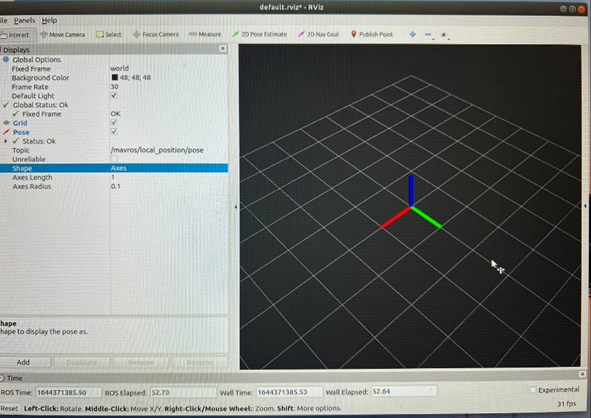
4.1.2 机载电脑自启动设置
机载电脑支持systemd自启动系统,用户可以添加自己的自启动脚本。具体方法可以参见Ubuntu systemd service的管理方法。
目前OWL无人机已经添加的自启动服务有Wifiap,和Visquad:
- Wifiap服务:启动无线AP网络
具体的AP的参数在/home/khadas/bin/wifi.sh。用户可以修改AP的IP,密码等。
- Visquad服务:启动OWL视觉算法
对应的视觉算法启动脚本在/home/khadas/bin/visquad.sh。用户可以修改/添加自启动的程序。
4.2 OWL无人机飞行模式
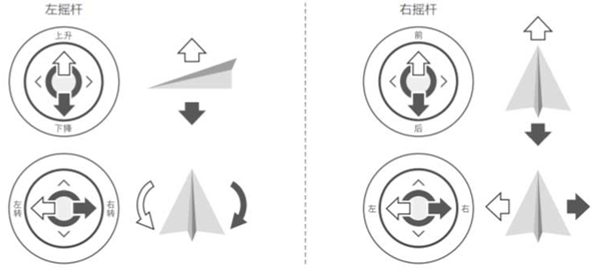
4.2.1 认识遥控器
OWL采用富斯i6x遥控器,左侧操纵杆为油门通道,如图4.6。
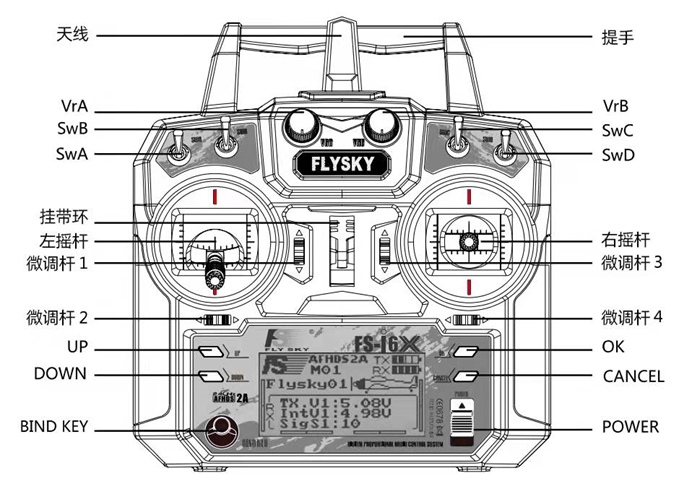
注意事项:
1.请勿在无人机飞行时关闭遥控器。
2.天线四周信号强度更大,请避免遥控器天线直接指向无人机。
4.2.1 主要支持的飞行模式
以下为四个常用的飞行模式,在首次飞行前请务必熟知每个飞行模式的飞行特点:
- 自稳控制模式(STABILIZE):飞控系统会让无人机保持稳定,是最基本的飞行模式。自稳模式下,视觉定位的结果是没有被融合到飞控的EKF算法中的,需要用户进行手动控制无人机姿态。在飞行测试中,如果发现位置异常,用户应尽快调整到该模式以保证无人机安全,防止炸机。此模式高度不会自动保持,随油门变化而变化。
- 高度控制模式(ALTCTL):定高模式下,飞控系统会根据气压传感器的数据保持当前高度,定高悬停时,无人机依然可通过遥控来移动,此模式下无人机会随着风漂移。
- 位置控制模式(POSCTL):即悬停模式,飞控融合了机载电脑的视觉定位结果,不手动控制时候不会出现漂移等现象,类似于GPS融合的效果,使无人机在无GPS信号环境下保持位置锁定。这个时候无人机还是响应遥控器发出的控制指令。如飞行中位置数据丢失则无人机会自动切换为定高模式。
- 外部控制模式(OFFBOARD):当遥控器切入OFFBOARD模式后,无人机不再响应遥控器的控制指令,无人机的控制由机载电脑指令控制。这个时候可以进行自动飞行,具体上是由机载电脑的EGO-Planner来发出控制指令。
在机载电脑提供的EGO-Planner程序里,我们提供了简单的控制Demo。EGO-Planner中的mavros_controller程序检测遥控器控制channel5(遥控器SWC)发出的信号,一旦将遥控器模式切换到OFFBOARD模式后,mavros_controller会触发在无人机刚上电后机头指向的方向(也就是X方向)前进5米的一个目标(前进5米是可以配置的参数)。EGO-Planner会根据当前位置和双目的深度图,进行避障和路径规划,生成实时的无人机目标控制命令,直至到达目标。用户可以参见mavros_controller的程序来编写自己需要的控制程序。
4.2.2 飞行模式的切换
OWL出厂默认将模式设定为自稳控制、位置控制、外部控制模式,飞行模式切换由遥控器SWC开关(三段开关)控制,模式切换如表4.1所示。
| SWB开关状态 | 当前飞行模式 带GPS |
| 低位(上) | 自稳控制模式(STABILIZE) |
| 中位(中) | 位置控制(POSCTL)(有定位) | 高度控制(ALTCTL)(无定位) |
| 高位(下) | 外部控制模式(OFFBOARD)(此模式会触发自动避障飞行,请谨慎) |
注意事项:
高度控制和位置控制模式下可以通过遥控器调整高度,油门低于50%无人机将下落,高于50%会上升,等于50%则保持高度不变。
当无人机从高度控制或位置控制模式切换回自稳模式时,油门位置不能过高,否则会造成无人机快速上升容易造成失控,也不可过低,过低会造成无人机快速下降。
4.3 OWL飞控系统状态
4.3.1 飞控板载LED状态
- 青色灯闪:飞控系统初始化
- 绿色快闪:传感器正在校准
- 绿色慢闪:无人机未解锁
- 蓝灯常亮:无人机已解锁
4.3.2 飞控板载蜂鸣器状态
- 上电后音乐声:飞控系统初始化
- 嘀嘀嘀急促声:在POSCTL模式下定位数据丢失报警
5 无人机飞行操控
5.1 飞行前的检查
1.请确保无人机各部件安装牢固,连接妥当,并确保无任何未固定的零部件及不必要的零部件遗漏在无人机上。
2.确保螺旋桨安装妥当且牢固。
3.请确保无人机及遥控器电量充足。
4.请勿在人口稠密区域或其他无人机的飞行范围试飞,如有必要可在飞行区域周围设置警示标志。
5.注意禁飞区和限制高度,请勿在禁飞区内或超过限制高度飞行。
6.开启时请先启动遥控器,再启动无人机,遥控器启动时油门务必在最低位置。
5.2 无人机开机初始化
1. 将遥控器油门摇杆拉到最低,先打开遥控器电源,保证无人机时刻受到遥控器控制,避免造成失控状态。
2.将无人机放置在平整场地,保持静止不动,长按无人机开机按键。注意不要在晃动中上电,会导致陀螺仪初始化采样失败或者航向轴数据漂移,无法正常启动。
3.若飞行状态指示灯绿色闪烁,表明初始化完成,此时无人机处于上锁状态。可进行下一步操作。
5.3 无人机解锁与起飞
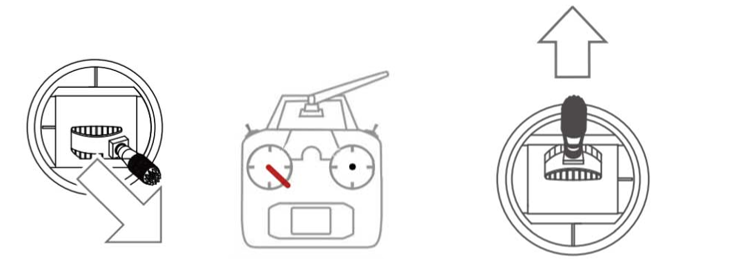
初始化完成后,解锁
将左侧油门摇杆推到右下角保持3秒,如图5.1所示,螺旋桨开始低速旋转,此时飞行状态指示灯蓝色常亮,解锁完成。
电机启动后,需立刻将横滚、俯仰和偏航杆回中。轻轻推动油门杆使无人机起飞,遥控器操作如图5.2所示(左侧摇杆)。
通过遥控器对无人机进行姿态控制如图5.3所示。
1. 在自稳(姿态)模式下,轻推油门摇杆至30%保持不动,轻微拨动右侧摇杆,观察无人机电机转动趋势是否与摇杆方向以及杆量一致,若一致,无人机工作正常;若不正常,请立即停转检查硬件连接。
2. 慢慢推动油门起飞,观察无人机是否竖直上升,如果有偏移的趋势,请及时拨动右侧摇杆修正方向,待无人机离开地面后,请时刻保持对方向的控制。
3. 初次飞行不要离开地面过高,各种操作幅度均不要过大,逐渐熟悉无人机的各方面性能状况,在熟悉无人机的各方面状况后,再进行正常飞行。
5.4 无人机降落与锁定
逐渐降低油门杆的位置,使无人机逐渐下降,遥控器操作如图5.4所示(左侧摇杆)。

将左侧油门摇杆推到左下角保持3秒,螺旋桨停止转动,飞行状态指示灯变为蓝色闪烁状态,此时无人机处于上锁状态,如图5.5所示。
注意事项
1. 降落时,切勿直接将油门杆降低到最低,应慢慢降低油门,以免坠落失控。
2. 无人机着陆后,当螺旋桨停止转动之前,请勿用手触碰,以免受伤。
3. 螺旋桨未停转前,请务必保持遥控器在手中,以保证无人机在完全控制中。
4. 关闭时请先关闭无人机再关闭遥控器。
5.5 无人机关机操作
在关闭无人机电源之前建议先执行机载电脑关机命令,否则可能会导致机载电脑磁盘损坏,操作命令如下:
>sudo shutdown -h 0 6 机载平台软件
这里列出来的软件安装和配置,在初始镜像中都是配置好的,用户可以选择重新烧写镜像以获得完整功能,也可以自行进行安装和配置。
6.1 ROS系统安装
机载平台上是Ubuntu20, 需要安装ROS Noetic系统。安装方式参见网上教程: http://wiki.ros.org/ROS/Installation。
我们在标准ROS基础上,还安装了双目驱动模块(stereo_cam),mavlink和mavros模块,VINS-fusion模块,ego-planner模块等。这些模块装在/home/khadas/ros_ws/src目录下。
6.2 stereo_cam模块配置
stereo_cam模块控制USB3.0连接的双目硬件,同时接收双目的GPIO。Stereo_cam会根据配置生成双目图像、视差图、深度图和点云图。配置文件在launch/stereo_cam.launch, 参数说明如下:
- framerate:双目帧率,目前支持10,15,20,30,60。目前深度图最大输出频率是20fps。
- stereo_combined:双目合并成一帧或左右图输出。缺省是false,左右图输出。
- depth_enabled:是否打开深度图计算和输出。
双目参数配置文件,config/stereo_param.yaml。这里深度图计算用的双目相机参数。
6.3 mavros模块配置
mavros是基于1.5.0版本的https://github.com/mavlink/mavros.git,我们做了如下修改:
- 坐标系的修改和transform的发布。
- 修改了/mavros/local_position/odom的坐标系为“world”。
6.4 IMU模块配置
因为我们使用了飞控IMU,需要配置mavros, 使其输出200hz.
>rosservice call /mavros/set_stream_rate 0 10 1
>rosrun mavros mavcmd long 511 105 3000 0 0 0 0 0
6.5 PX4飞控系统配置
飞控系统需要配置成关闭GPS和Compass,打开融合Vision的模式EKF2。可查看飞控的配置参数。
QGC: 设置EKF2_AID_MASK为24
QGC: 设置EKF2_HGT_MODE为vision
QGC: 设置 EKF2_EV_DELAY为0ms.
QGC: 设置mavlink串口速率921600,onboard模式
QGC:设置对应的GYRO/ACC误差精度
6.6 VIO模块配置
我们使用VINS_Fusion(https://github.com/HKUST-Aerial-Robotics/VINS-Fusion)作为双目定位模块,主要修改如下:
- 接收stereo_cam模块发出的双目图像和mavros发出imu消息。消息定义可以在config/stereo中的yaml文件里修改。双目的内参,双目相机和IMU之间的外参也在这里修改。具体参数的标定方法可以参见kalibr工具说明和网上教程。
- 发布world坐标系下的/mavros/vision_pose/pose,和Transform。Mavros会转换到map坐标系,进而发送给飞控。
- VINS_Fusion的工作原理,可以参见其官方网站。
6.7 Planner模块配置
我们适配了ego-planner项目来作为避障导航模块,详情可以参见https://github.com/ZJU-FAST-Lab/ego-planner。并做了如下修改:
- 去除了模拟器,取而代之的是mavros_controller,来控制PX4。 删除了src/uav_simulator/Utils/rviz_plugins;增加了/reference/flatsetpoint消息,这个消息传递规划好的路径给mavros_controller, 后者在发送setpoint_local给飞控。
- 我们采用深度图,飞控的位姿(/mavros/local_position/odom)作为ego-planner的输入。
增加了mavros_controller(https://github.com/Jaeyoung-Lim/mavros_controllers)模块来控制飞控。主要修改如下:
- 针对遥控器,将飞控状态控制(GUIDED, POS_HOLD等)交给遥控器channel 5。
- 接收遥控器channel5的信号,来触发开始信号。mavros_controllers收到开始信号时候,会根据配置发送目标(goal)给ego-planner,并监听/reference/flatsetpoint消息,转换成setpoint_local消息发送给mavros,最终控制PX4。
运行脚本参见launch/vim3.launch,其中需要配置参数如下:
- Depth相机的参数width, height, cx, cy, fx, fy。这些在stereo_cam中的深度图像信息的消息中得到。
- 无人机前进最大速度和加速度 max_vel, max_acc。
- 测试中使用的目标参数goal_dist,是每次出发开始信号,mavros_controller会出发无人机前方多远的坐标作为假想目标。
7 产品使用注意事项
7.1 IMU—加速度计校准
7.1.1 什么情况下需要校准加速度计
无人机经过长距离运输或者坠落后,结构会发生细微变化,将导致数据异常,飞行过程中可能出现往某个方向飘移严重的情况,此时需重新校准加速度计,可以经常校准以使加速度计工作在最佳状态,如飞行正常则无需校准。
加速度计的校准需要一块水平的桌面或者地面,将以它作为校准时的水平垂直姿态参考,重新下载固件后也需要进行校准。
注意事项:
调试与校准过程中一定不要安装螺旋桨,以免造成人身伤害或财产损失。
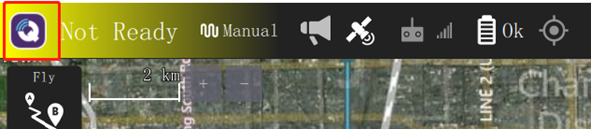
首先让无人机处在断电状态,将飞控通过USB与电脑连接,打开QGroundControl地面站软件,软件会自动连接飞控,点击顶部工具栏中最左侧的“齿轮”图标,如图7.1所示。
点击“Vehicle Steup(设备设置)”下的“Sensors(传感器)”菜单,选择“Accel erometer”(加速度计校准),如图7.2所示。
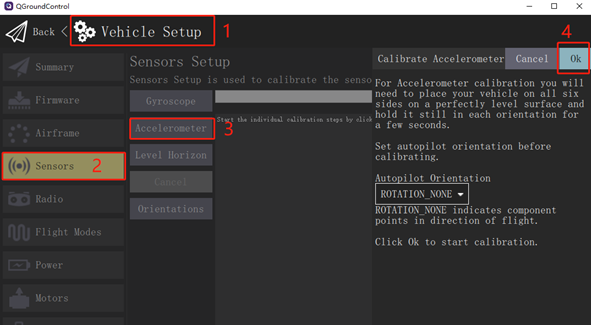
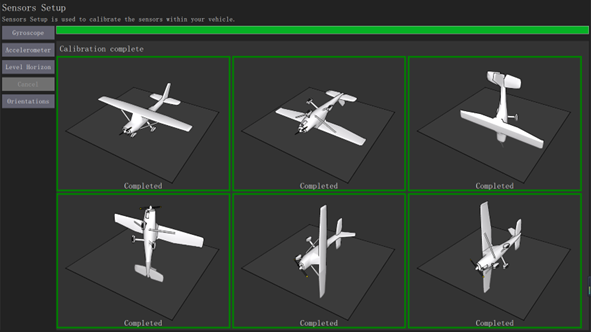
点击“OK”之后开始进行加速度计校准步骤,根据屏幕上的6个图标提示,将无人机按照提示放置,一旦提示(方向图标会变为黄色),请保持无人机静止,完成当前方向的校准后,屏幕上的相关图标将变为绿色。按照提示依次完成6个方向的校准,校准时提示框如下图7.3所示。
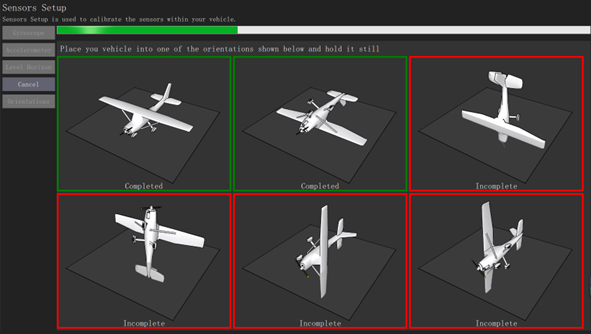
当所有方向校准完毕后,QGroundControl将显示校准完成(所有方向图标将以绿色显示,进度条将完全填满)。提示框如下图7.4。
7.2 IMU—水平校准
7.2.1 什么情况下需要进行水平校准
将无人机水平放置,查看QGroundControl里的姿态仪(顶部为蓝色,底部为绿色)显示当前是否水平,如不水平,则可以使用水平校准来调节补偿并对齐。水平校准可以使无人机产生最佳的飞行性能。 如果您在飞行过程中发现无人机持续往某个方向漂移,也可以进行水平校准。如图7.5所示。

7.2.2 水平校准步骤
首先让无人机处在断电状态,将飞控通过USB与电脑连接,打开QGroundControl地面站软件,软件会自动连接飞控,点击顶部工具栏中最左侧的“齿轮”图标。点击“Vehicle Steup(设备设置)”下的“Sensors(传感器)”菜单,选择“Level Horizon”(水平校准),如图7.6所示。
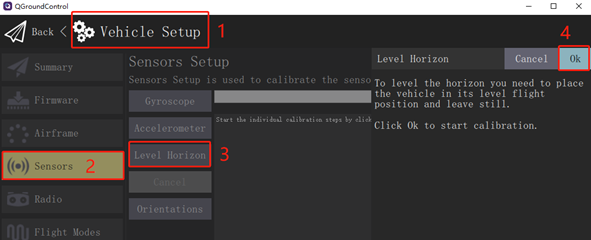
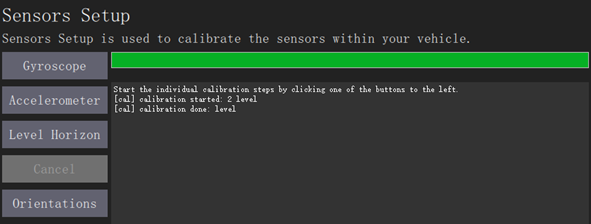
将无人机放置于水平状态,点击右边的“OK”开始进行水平校准,等到校准过程结束,进度条将完全填满,如图7.7所示。
完成水平校准后,在QGroundControl飞行界面中检查姿态仪的地平线是否处于水平位置(顶部为蓝色,底部为绿色)。
7.3 视觉定位功能可能出现的问题
当无人机飞行提示不正常,或者配置修改,或者有撞击等异常事件后建议重新校准各个传感器。并且验证各个模块运行正常。
7.4 视觉定位功能验证
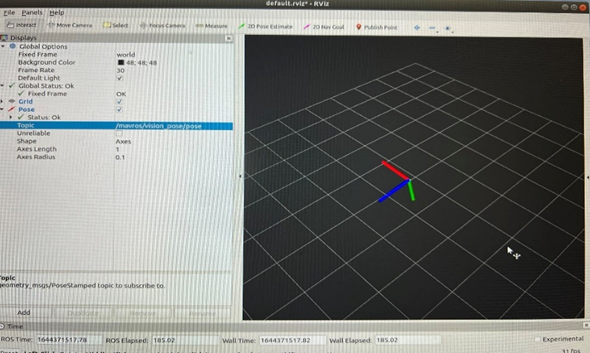
- 利用PC机器直接登录到视觉模块(ssh khadas@192.168.2.20),然后监听视觉定位消息(rostopic echo /mavros/vision_pose/pose)。也可以在有 ROS功能的PC机器上通过ROS remote连接,直接监听定位消息,或者在rviz界面观察/mavros/vision_pose/pose。
- 验证方法:手持无人机进行前后左右等运动,定位消息始终反应了正确的运动趋势,并且当无人机放回原点时候,定位消息也基本回到原点坐标。如图7.8。
7.5 双目相机标定
当无人机双目模块发生外力撞击,或者飞控模块和双目模块位置发生变化的时候,需要重新标定双目系统。
视觉模块提供了双目的ROS驱动,和mavros应用。用户可以通过rostopic看到/stereo_cam/left/image_raw,/stereo_cam/right/image_raw,和/mavros/imu/data_raw。运行rosbag record 来记录这些消息,然后进行校准。
我们使用kalibr(https://github.com/ethz-asl/kalibr)工具标定双目和IMU的内外参数,用户自行可以参见网上校准的教程。
标定后的参数需要写入相关算法程序的配置文件。详情见软件配置中的stereo_cam模块配置,和VIO模块配置。
7.6 机载平台镜像恢复
我们提供预装好应用的镜像,用户可以通过烧录工具,或者SDCard来烧录镜像。具体烧录方法参见VIM3的相关说明。
https://docs.khadas.com/linux/vim3/InstallOsIntoEmmc.html
https://docs.khadas.com/linux/vim3/InstallOsIntoSdusb.html
7.7 锂电池使用注意事项
- 无人机电池在使用时电池电压不得低于14.6V,否则会导致电池损坏。
- 无人机不使用时,应将电池取出,并且单独存放。
- 不可将电池放置于靠近热源、易燃易爆品的区域。
- 避免电池长期放置在低温的室外,否则电池活性将大大降低,甚至造成
- 锂电池性能不可逆的下降。
- 保持存放环境干燥,勿将电池放置于可能漏水和潮湿的位置。
- 如果您超过10天不使用电池,将电池放电至40%至65%的最佳存放电
- 量进行存放,切勿在完全放电状态下长期放置,以免电池进入过放状态
- 造成电芯损害,否则将无法恢复使用。
- 建议2-3个月重新充放电一次,以保证电池活性。
- 在长期存储时,务必在-10°C~45°C范围内的环境中存放。
7.8 故障排除
1、无法解锁:首先检查遥控器是否打开,接收机是否亮灯,接收机模式是否正确,接收机与遥控器是否对频,接收机信号线是否断路,经常插拔可能会造成信号线损坏;解锁时检查地面站提示什么信息,是否是因为没有校准某些项目导致无法解锁;
2、起飞未离地时严重往某个方向偏:检查电机旋转方向,检查螺旋桨安装方向;
3、起飞后飞行中严重往某个方向偏:检查姿态是否水平;检查遥控器微调按钮是否不在中位。
4、电机旋转异常,解锁后有异响,转动卡顿:检查电机内部是否有异物,因电机内有磁铁,很容易吸附一些金属碎屑;拆装训练时使用长螺丝固定电机,会把电机的线圈顶坏,电机转动也会出现卡顿现象;
5、定高模式下,高度不能很好的保持:检查螺旋桨是否有损坏缺口,飞控减震球是否有损坏,造成动平衡差,无人机震动大,震动过大会导致飞控加速度计Z轴噪声大,会影响到无人机定高。
6、部分电机不转:检查电调信号线是否接好,电调是否校准过,试着把此路电调信号线接到正常的接口上测试。
7、飞行时无人机出现抖动现象:检查PID参数,可能因为PID参数过大导致。