基于视觉的无人机定位/导航/避障
UAV+AI创新实验室建设方案
一.背景
博弈智能机器人时代,重新定义无人机控制算法研发
中国的人口红利正在消失,这也意味着未来劳动力的短缺将是一个中长期现象,工农业自动化程度提高十分迫切,因此机器人时代已大势所趋。无人机飞行器作为空中机器人,在各行各业都发挥了重要的作用,而控制算法是无人机技术的核心之一。高校实验室与科研领域是无人机控制算法的主要研究阵地,面对未来智能时代,需要重新定义控制算法的教学和研发方式。行业亟需一种更快速、高效的无人机控制算法研发模式,帮助教学及科研工作者在第一时间对算法进行实践验证,以提高教学和科研效率,适应科技风云瞬息万变的机器人时代。
无人机在躲避障碍物过程中,能够通过传感器、云端控制、摄像头这样的闭环,此外,依靠计算机视觉对环境进行检测,分析周围环境的特征,实现自我规划路径,就像人看到障碍物知道绕道那样。
但这不只是简单的避障。在陀螺仪和加速计的配合下,无人机知道如何根据环境特征进行移动。通过每秒做数百次的运算,计算出最可行的方位和速度。传感器不同的等级、不同的不确定性,我们都可以通过概率学的方法把系统数据融合在一起,通过一个等式把它归纳成一个位置和速度的估算。但这个要达到一定灵敏度也仍是个挑战。
此外,无人机在飞行过程中不仅需要可以判断其速度和位置,还要加以控制,避免走入障碍物区。这就是需要地图的识别技术了。
近几年,四旋翼无人机的位姿估计即定位问题受到越来越多的关注。四旋翼无人机准确的定位是实现避障、路径规划以及抓取等各种复杂任务的基础和前提。目前广泛应用的定位方法有两类:一类是基于四旋翼无人机自身对环境进行同步定位与制图(SLAM),从而获得精确的位置信息;另一类是基于外部设备提供精确的位置信息,如全球卫星定位系统,光学动作捕捉系统。光学动作捕捉系统拥有高分辨率的摄像头,可以亚毫米级追踪一个或多个无人机的位姿。近几年,很多研究人员通过光学动作捕捉系统实现了四旋翼无人机的运动估计,并通过光学动作捕捉系统实现了多旋翼无人机的暴力操作,倾斜墙面上的停靠,以及物体抓取。光学动作捕捉系统适用在实验室、研究室这种研究场所,在科研阶段非常适用。同样,利用全球卫星定位系统实现定位的方法也有明显缺陷,因为在建筑物密集、室内、隧道等地方GPS定位几乎是完全失效的。综上所述通过视觉SLAM方法提供运动控制所需的准确位置信息又更大的应用价值。

几种典型的有遮挡的飞行环境
二.解决方案
2.1.AI视觉无人机开发平台—猫头鹰(OWL)
2.1.1. AI视觉无人机开发平台(OWL)概述
Owl是专为科研工作者与航空器开发者打造的小型化无人机开发平台,它搭载VisBot视觉模块,适用于无GPS环境下基于视觉的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。Owl拥有自主的双目传感器和开发平台,平台支持ROS接口,提供了6核CPU和5Tops TPU计算资源。同时预装了融合了港科大的VINS_Fusion VIO算法的自定位系统,可以满足室内无人机定位需求。同时提供了EGO-Planner视觉避障算法,可以提供视觉避障功能。



2.1.2.平台特点
- 搭载VisBot视觉模块;
- 预装港科大VINS_Fusion VIO算法自定位系统;
- 国产化双目,支持ROS接口;
- EGO-Planner视觉避障算法开源;
- PX4开源。
2.1.3.无人机平台参数

- 机架:机身采用四旋翼X型结构,对角轴距380mm,机身尺寸:310mm*310mm*170mm,机身材质为碳纤维和航空铝,中心板集成分电板和电池供电功能;
- 电调:多旋翼专用20A BL_Heli_s高速电调;
- 电机:2212-980KV三相交流无刷电机;
- 桨叶:9450高效耐摔尼龙螺旋桨;
- 遥控器:≥8通道,高分辨率显示屏,内置电池;
- 支持飞行模式:自稳(姿态)、定高飞行模式;
- 最长飞行时间:27 min;
- 最大飞行速度:15 m/s;
- 最远遥控距离:≤1000 m;
- 最大巡航速度:15 m/s;
- 最大上升速度:5 m/s;
- 最大下降速度:4 m/s;
- 俯仰轴旋转角速度:20°/s;
- 航向轴旋转角速度:60°/s;
- 飞行时最大风速:8 m/s;
- 气压计定高精度:±0.5m;
- 工作温度:-10 ℃~45℃。
2.1.4.VisBot视觉模块
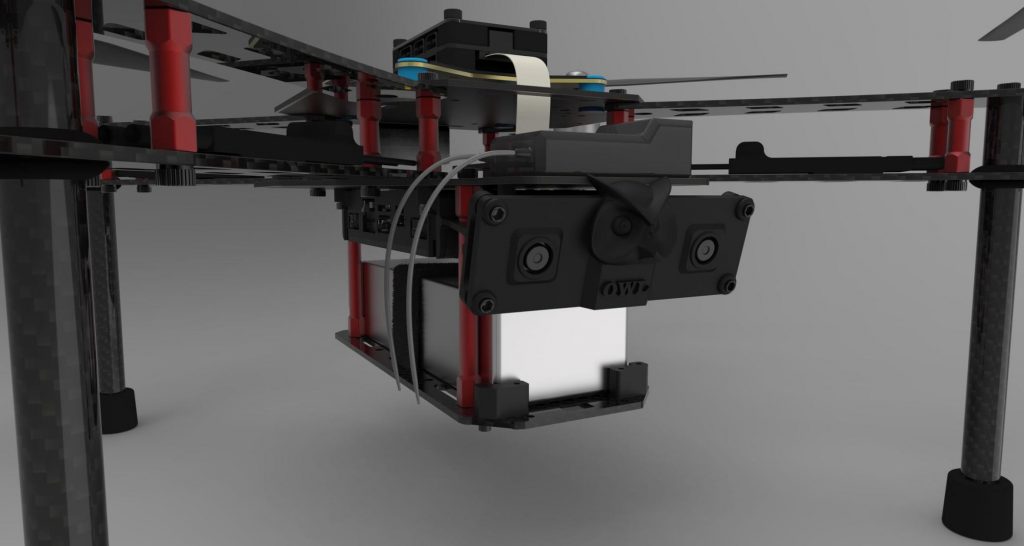
VisBot视觉模块是为VisBot无人机提供视觉定位和避障功能模块。它包括双目视觉(stereo camera)传感器,惯性导航模块(IMU),视觉算法计算模块(CVM)三个部分。
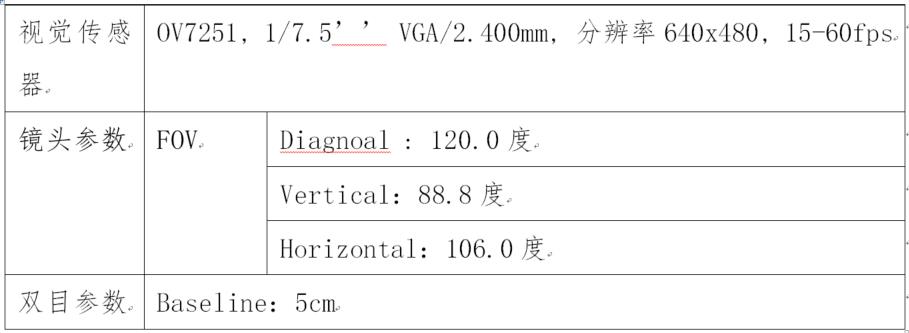
- 双目视觉传感器(stereo camera)的具体参数如下:
- 惯性导航模块(IMU)是InvenSense公司的ICM20689六轴惯导传感器。具体参数可以参见InvenSense的相关产品介绍。
- 视觉算法计算模块(CVM),底层和硬件是Khadas VIM3开发板,其相关的镜像,系统,硬件信息可以参见AMLogic公司的相关产品介绍。在VIM3开发板上,我们构建了上述传感器的驱动和输入底层软件(infrastructure layer),并基于底层软件提供了开源的视觉定位和避障算法等。
VisBot视觉模块,整合双目视觉等软硬件资源,为无人机的室内定位和避障提供了计算平台和用例。所使用的视觉算法(VIO,SLAM,planner等),我们提供相对应的开源参考和所作的修改。因此,这个平台既可以作为无人机视觉定位模块直接使用,也可以作为相关算法开发平台使用。
2.1.4.Demo测试

悬停测试

拖拽测试

自主避障测试
2.2. AI视觉无人机蜂群开发平台—猫头鹰mini
2.2.1.技术指标


2.2.2.Demo测试

手掌之间自由起落

轴距200mm,续航13mini,重量小于500g

自主避障飞行速度达2m/s

悬停测试
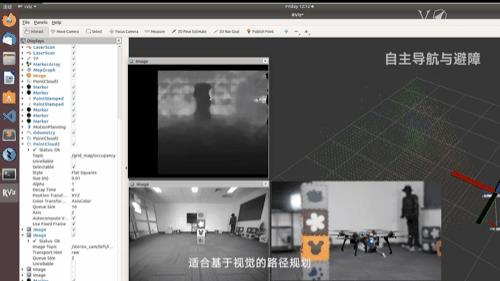
路径规划,自主导航与避障
蜂群编队算法开发/验证

目标识别、追踪算法开发/验证
密林自主飞行
2.3.飞行测试场地
保证人员、机器安全,能够满足无人机自主定位/避障开发需求。

三.配置清单
| 编码 | 名称 | 单位 | 数量 | 备注 |
| 1 | 视觉无人机机架 | 套 | 4 | 含单机、电调、桨叶 |
| 2 | 蜂群无人机机架 | 套 | 6 | 含单机、电调、桨叶 |
| 3 | AI视觉机载计算机 | 套 | 10 | |
| 4 | AI视觉双目模组 | 套 | 10 | |
| 5 | PX4开源飞控模组 | 套 | 10 | |
| 6 | 开源视觉定位模组 | 套 | 10 | |
| 7 | 开源路径规划模组 | 套 | 10 | |
| 8 | 开源swarm模组 | 套 | 4 | |
| 9 | 云台 | 套 | 2 | |
| 10 | 电池 | 套 | 20 | |
| 11 | 充电器 | 套 | 10 | |
| 12 | 飞行测试场地 | 套 | 1 | 含障碍物 |
| 13 | 标定板 | 套 | 1 | 标定工具 |