无人机蜂群分布式控制系统解决方案
一.引言
1.1.定义
集中式控制体系结构
在集中式控制体系中,由地面控制站中的操作人员制定任务分配方案和无人机具体和飞行航路,无人机本身不具备决策能力,完全按照地面控制站发出的任务指令和航路执行任务。其优点是分配算法实现简单且具备产生全局最优解的潜力。该种控制体系结构适用于已知确定的环境,规模较小的系统。如图,表示集中式控制体系结构图。
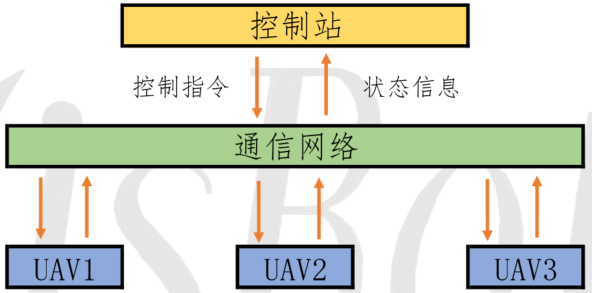
集中式控制体系结构图
同时,在集中式控制方式下,各无人机之间的协同控制也存在以下问题:
- 实时性差
因为无人机本身不具备决策能力,所以地面控制站的操作人员要求根据无人机集群通过数据传输返回的无人机状态信息、任务状态信息以及所处的环境信息等,对任务分配问题进行具体的决策。无人机集群与地面控制站保持着联系,当返回的数据量很大时,有可能地面控制站收到的信息是不全的或者是错误的,导致决策错误。地面控制站综合这些信息的速度较慢,导致决策较慢,实时性差。
- 计算时间长,算法复杂度高
对于集中式控制方法,地面控制站对所有的无人机传来的数据信息进行总结和分析,信息都集中在任务控制站中,解决问题的具体计算过程复杂,计算信息多,导致完成任务分配的计算时间很长。对于多类型任务的无人机集群,例如无人机集群中无人机能够执行任务种类的不同,无人机执行任务能力不同,此时更凸显了这个问题的严重性。
- 抗干扰能力较差
由于地面控制站往往只有一个,如果在具体任务执行过程中,地面控制站因为某些特定因素遭到毁坏甚至瘫痪,造成的损失将是巨大的。同时,无人机集群中的无人机失效或者发现新的任务目标,在原有基础上的额再分配也是相当复杂的。
分布式控制体系结构
区别于集中式控制体系,分布式控制体系中无人机集群中的无人机是具有独自决策能力的智能体,它们具有很强的协同能力和自治性。无人机之间以数据链技术为支撑,对无人机所处环境、任务目标集信息、无人机状态信息进行交互,综合考虑各种因素,提出具体的解决任务分配问题的方案和具体步骤。较之于集中式控制体系,无人机个体在分布式控制体系下具有较强的实时性、抗干扰能力、计算量小、计算复杂度小等优点,且其主要适用于动态环境,中等至大规模系统中。当前,分布式控制体系结构主要可以分为两种:完全分布式控制体系结构和部分分布式控制体系结构。
- 完全分布式控制体系结构
完全分布式控制体系是一种依靠无人机的自主性和相互协作的一种体系结构,由于无人机任务分配问题的复杂性,该方法相当于将复杂的问题分解一个相对简单的小问题,对每架无人机进行任务分配,接着就是将各个无人机的信息进行交互,对任务进行整体求解。如图所示,在完全分布式控制体系中,把无人机看成具有决策能力的智能体,这样无人机任务分配问题就转化成为各个智能体之间任务的分配决策问题。在这种体系结构中,无人机相对于集中式控制体系有很强的自主性,能够对任务集信息和自身的信息进行采集和分析,并进行决策,在特定的情况下通过数据链与其他无人机进行数据交互,协作完成所需执行的任务。
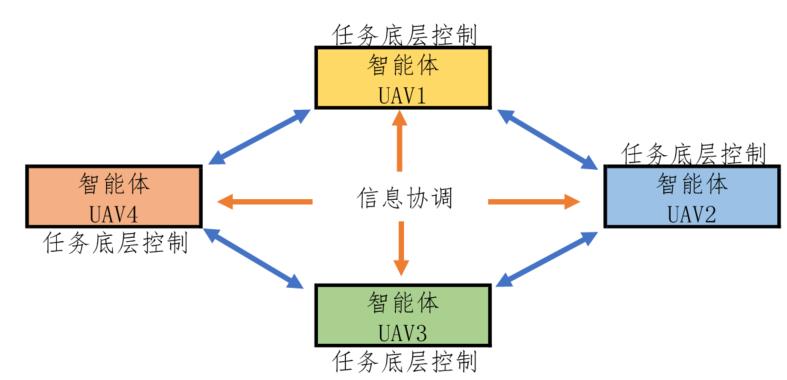
完全分布式控制结构
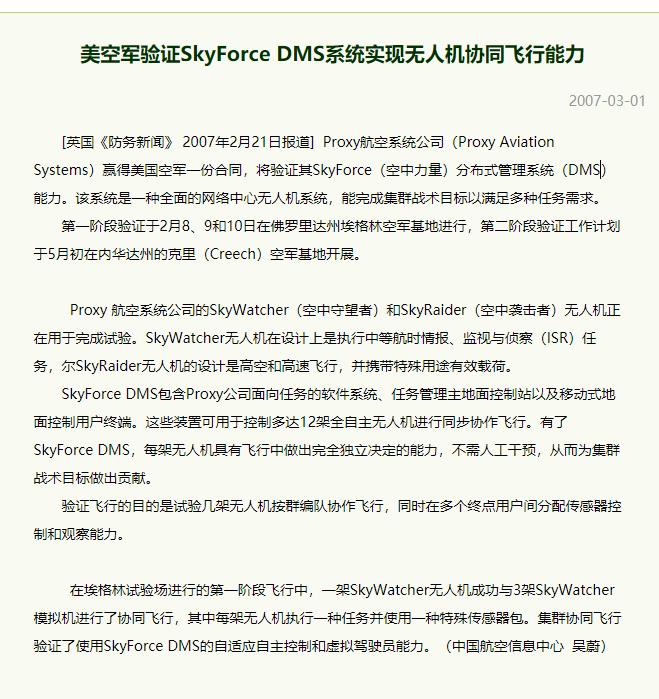
在分布式控制体系中,无人机集群内各个无人机对所得到的信息进行共享,得到所有的关于任务执行的信息,最后整体分析所得到的信息对无人机集群中的每一架任务分配任务集。由于无人机集群中有多架无人机,在执行任务中可能发生交叉冲突,即碰撞冲突,所以需要考虑此问题并消除。同时在这种控制体系中,无人机之间是通过数据链技术进行任务集数据的传输和共享,为的是更好地具有任务决策的实时性,因此数据量是相当大的,将随着编队内无人机的数量呈指数增长。因此应用这种控制体系,编队内无人机的个数受到了很大的限制。在该体系结构下,其往往只能控制3~5架无人机,例如美国Proxy Aviation公司研制的“Skyforce”分布式多类型无人机任务管理系统仅在4架无人机之间进行协调控制。
1.2.概述
无人机蜂群分布式控制系统即多个无人机组成的集合,它的目标是将大而复杂的系统集成小的、彼此互相通信和协调的、易于管理的系统。无人机蜂群分布式控制系统在表达实际系统时,通过各无人机间的通讯、合作、协调、调度、管理及控制来表达系统的机构、功能及行为特性。
无人机蜂群分布式控制系统具有自主性、粉不行、协调性,并具有自组织能力、学习能力和推理能力。采用无人机蜂群分布式控制系统解决实际应用问题,具有很强的鲁棒性和可靠性,并具有较高的问题求解效率。
无人机蜂群分布式控制系统时无人机技术应用及研究的一个质的飞跃,不同行业专家学者对之进行了深入的研究并从多个角度阐述了无人机蜂群分布式控制系统用于解决实际问题的优势,归纳起来,主要有以下几点:
- 在无人机蜂群分布式控制系统中,每个无人机具有独立性和自主性,能够解决给定的字问题,自主地推理和规划并选择适当的策略,并以特定的方式影响环境;
- 无人机蜂群分布式控制系统支持分布式应用,所以要具有良好的模块性、易于扩展性和设计灵活简单,客服了建设一个庞大的系统所造成的管理和扩展的困难,应有效降低系统的总成本;
- 在无人机蜂群分布式控制系统实现过程中,不追求单个庞大复杂的体系,而是按面向对象的方法结构多层次、多元化的蜂群,要降低系统的复杂性,也要降低各无人机问题求解的复杂性;
- 无人机蜂群分布式控制系统是一个讲究协调的系统,各无人机通过互相协调去解决大规模的复杂的问题,其是一个集成系统,它采用信息集成技术,将各子系统的信息集成在一起,完成复杂系统的集成;
- 在无人机蜂群分布式控制系统中,各无人机之间通信,彼此协调,并行地求解问题,因此能有效地提高问题求解的能力。
无人机蜂群分布式控制系统主要做一下三个方面的研究:
编队队形的设计,多个无人机在指令下运行至指定的位置,并最终实现既定的编队形态,除了需要考虑无人机气动力影响外,还要考虑任务,要求无人机间信息交换的冗余度,同时保证无人机之间不会发生碰撞;
编队队形的保持,在无人机执行指定指令过程中能克服来自系统内部或外在环境干扰,进而保持整个队形不变;
编队队形的变换,在无人机行进过程中能够适应来自内部或外在环境干扰而对蜂群编队做出适当且合理的改变。
Ego-Planner swarm 自主蜂群控制,GPS拒止环境,蜂群自主定位/避障导航。
1.3.研究方向
1.无人机跟踪识别;
2.无人机搜寻/覆盖/建图;
3.无人机蜂群围捕;
4.无人机察打一体蜂群开发;
5.无人机多机对抗研究;(红蓝军)
6.无人机GNSS拒止环境自主测绘;
7.无人机GNSS拒止环境自主巡检;
8.无人机分布式蜂群(算法研究)。
二.方案介绍
2.1.硬件

对角线轴距:200mm;
续航时间:30min;
整备重量:574.5g;

2.2.无人机蜂群分布式控制系统
被控制对象:6架AI视觉无人机蜂群开发平台——猫头鹰mini;
无人机飞控:STM32主控芯片,三轴加速度计/陀螺仪ICM20608,气压计MS5611,支持S.BUS单总线接收模式;尼龙外壳;飞控留有全色LED指示灯;支持地面站USB升级固件;
视觉导航:自主研发双目视觉VisBot为无人机提供了视觉定位和避障功能。包括双目视觉(stereo camera)传感器,惯性导航模块(IMU),视觉算法计算模块(CVM)三个部分。为无人机的室内定位和避障提供了计算平台和用例。所使用的视觉算法(VIO,SLAM,planner等),提供相对应的开源参考和所作的修改。平台既可以作为无人机视觉定位模块直接使用,也可以作为相关算法开发平台使用。
机载电脑:平台支持ROS接口,提供了6核CPU和5Tops TPU计算资源。同时预装了融合了港科大的VINS_Fusion VIO算法的自定位系统,可以满足室内无人机定位需求。同时提供了EGO-Planner视觉避障算法,可以提供视觉避障功能。
扩展开发语言:支持C、C++编程,适合有一定代码开发能力的学生,进一步锤炼代码编程能力;
可用于无人系统的动态建模和控制研究、运动规划、避障控制、多信息融合、编队控制、多智能体协同控制、无人机蜂群开发、无人系统自主控制等。
2.3.功能介绍

手掌之间自由起落

自主避障飞行速度2m/s

室内悬停测试
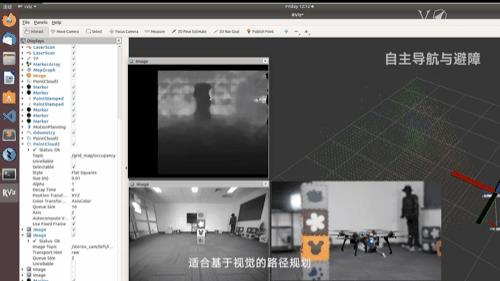
路径规划,自主导航与避障

目标识别、追踪算法开发/验证
密林自主飞行

蜂群编队算法开发/验证
2.4.蜂群软件架构
软件架构包括单机系统和算法软件,多机协同软件,多机通讯机制。猫头鹰mini单机系统基于Visbot视觉模块的软硬件,Visbot模块负责提供飞行前进方向的深度图,同时基于Vins-fusion的双目定位算法提供飞机的姿态定位信息。
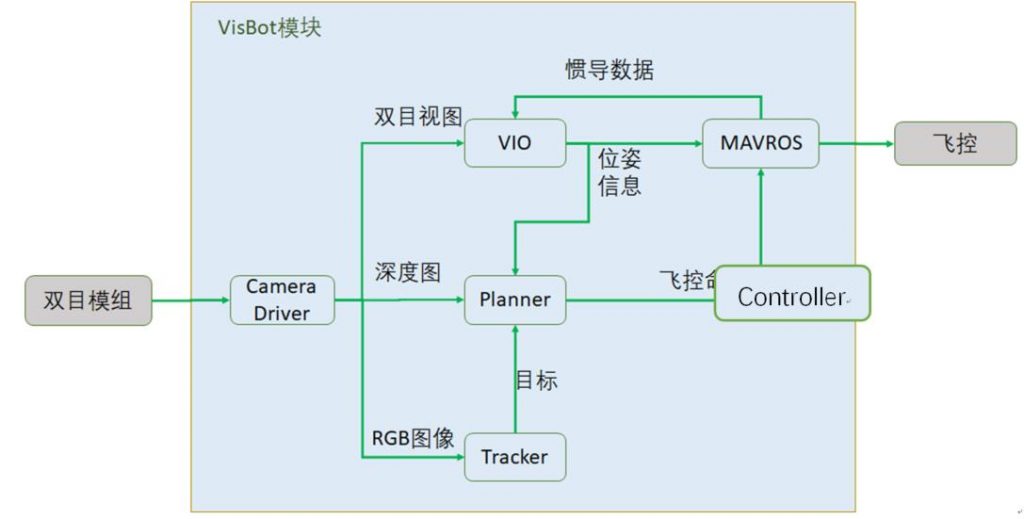
图:Visbot视觉模块软硬件架构图
如果是单机系统,类似于ego-planner的避障导航软件就可以指导飞机完成避障环境下的轨迹规划,结合我们提供的控制软件就可以进行目标飞行。但是如果在多机协同环境,还需要协调多机轨迹、位置、同步完成多机目标飞行。我们适配了ego-planner-swarm开源软件,作为多机协同下的避障导航软件。它结合了多机的位置,和各自目标下的轨迹,整体规划出防碰撞轨迹。再结合我们提供的控制软件就可以同步控制集群进行目标飞行。
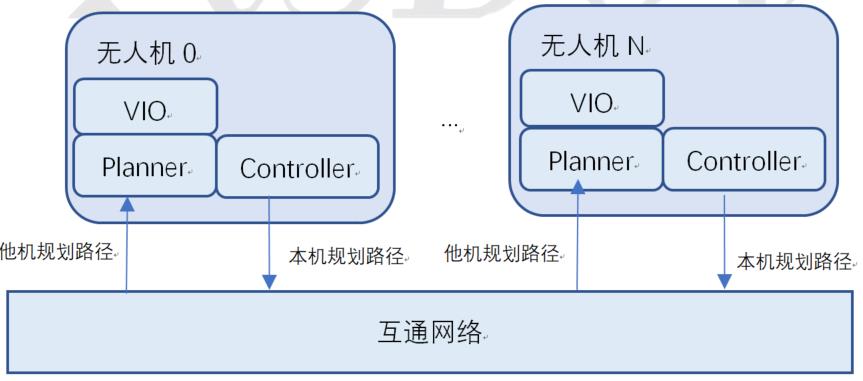
图:多机协同架构
在分布式多机协同系统中,需要互通网络环境和多机通讯机制。目前引用的ego-planner-swarm软件是基于ROS系统的多机通讯机制,是Master/Slave架构的消息通讯机制。我们Visbot视觉模块提供了Wifi接口,它可以接入大功率Wifi基站,优势是可以较长距离通讯;也可以配置成自组网模式(ROS Master配置成WifiAP), 省去Wifi基站,可以满足小范围的机群需求。

三.配置清单
3.1.无人机蜂群分布式控制系统
| 编码 | 名称 | 型号 | 单位 | 数量 |
| 1 | AI视觉无人机蜂群开发平台 | OWL mini L | 架 | 6 |
| 2 | 集群示例包 | V-AutoCoder | 套 | 1 |
| 3 | 蜂群示例包 | V-swarm | 套 | 1 |
| 4 | Tracker示例包 | V-tracker | 套 | 1 |
| 5 | 飞行测试场地 | V-space | 套 | 1 |
| 6 | 大功率Wi-Fi | V-wifi | 台 | 1 |
| 7 | 上位机工作站 | V-PC | 台 | 1 |
3.2.无人机算法验证系统(选配)
| 编码 | 名称 | 型号 | 单位 | 数量 |
| 编码 | 名称 | 型号 | 单位 | 数量 |
| 1 | 光学动捕相机 | V-Goku | 台 | 8 |
| 2 | 动捕软件 | V-MCTool | 套 | 1 |
| 3 | 标定工具 | V-Calibration Tool | 套 | 1 |
| 4 | 标记点 | 定制 | 包 | 4 |
| 5 | 固定装置 | 定制 | 套 | 8 |
| 6 | 综合布线 | 六类网线 | 套 | 1 |
| 7 | 交换机 | 交换机 华为 14口 | 台 | 1 |
| 8 | 部署实施 | 定制 | 项 | 1 |