认识遥控器 #
OWL采用富斯i6x遥控器,左侧操纵杆为油门通道,如图4.6。
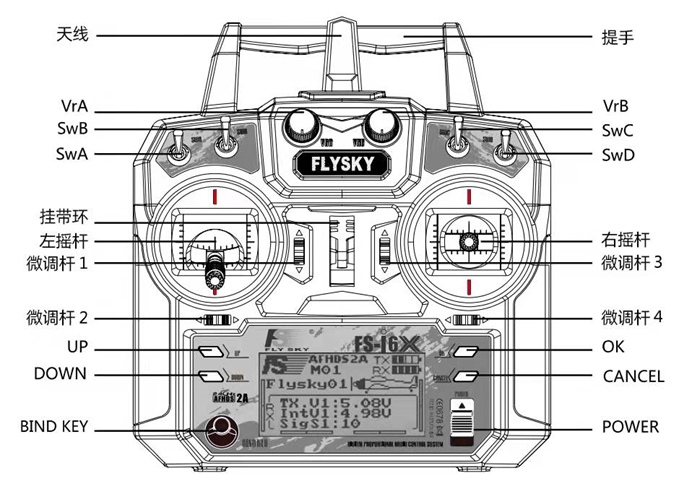
注意事项:
1.请勿在无人机飞行时关闭遥控器。
2.天线四周信号强度更大,请避免遥控器天线直接指向无人机。
主要支持的飞行模式
以下为四个常用的飞行模式,在首次飞行前请务必熟知每个飞行模式的飞行特点:
- 自稳控制模式(STABILIZE):飞控系统会让无人机保持稳定,是最基本的飞行模式。自稳模式下,视觉定位的结果是没有被融合到飞控的EKF算法中的,需要用户进行手动控制无人机姿态。在飞行测试中,如果发现位置异常,用户应尽快调整到该模式以保证无人机安全,防止炸机。此模式高度不会自动保持,随油门变化而变化。
- 高度控制模式(ALTCTL):定高模式下,飞控系统会根据气压传感器的数据保持当前高度,定高悬停时,无人机依然可通过遥控来移动,此模式下无人机会随着风漂移。
- 位置控制模式(POSCTL):即悬停模式,飞控融合了机载电脑的视觉定位结果,不手动控制时候不会出现漂移等现象,类似于GPS融合的效果,使无人机在无GPS信号环境下保持位置锁定。这个时候无人机还是响应遥控器发出的控制指令。如飞行中位置数据丢失则无人机会自动切换为定高模式。
- 外部控制模式(OFFBOARD):当遥控器切入OFFBOARD模式后,无人机不再响应遥控器的控制指令,无人机的控制由机载电脑指令控制。这个时候可以进行自动飞行,具体上是由机载电脑的EGO-Planner来发出控制指令。
在机载电脑提供的EGO-Planner程序里,我们提供了简单的控制Demo。EGO-Planner中的mavros_controller程序检测遥控器控制channel5(遥控器SWC)发出的信号,一旦将遥控器模式切换到OFFBOARD模式后,mavros_controller会触发在无人机刚上电后机头指向的方向(也就是X方向)前进5米的一个目标(前进5米是可以配置的参数)。EGO-Planner会根据当前位置和双目的深度图,进行避障和路径规划,生成实时的无人机目标控制命令,直至到达目标。用户可以参见mavros_controller的程序来编写自己需要的控制程序。
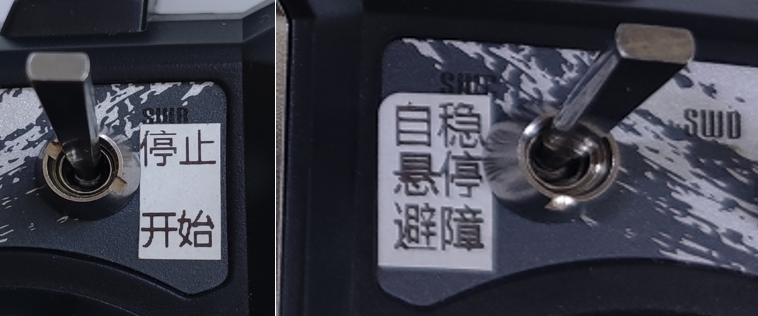
飞行模式的切换 #
OWL出厂默认将模式设定为自稳控制、位置控制、外部控制模式,飞行模式切换由遥控器SWC开关(三段开关)控制,模式切换如表4.1所示。
| SWB开关状态 | 当前飞行模式 带GPS |
| 低位(上) | 自稳控制模式(STABILIZE) |
| 中位(中) | 位置控制(POSCTL)(有定位) | 高度控制(ALTCTL)(无定位) |
| 高位(下) | 外部控制模式(OFFBOARD)(此模式会触发自动避障飞行,请谨慎) |
注意事项:
高度控制和位置控制模式下可以通过遥控器调整高度,油门低于50%无人机将下落,高于50%会上升,等于50%则保持高度不变。
当无人机从高度控制或位置控制模式切换回自稳模式时,油门位置不能过高,否则会造成无人机快速上升容易造成失控,也不可过低,过低会造成无人机快速下降。



